


Bluetooth Robot Car Controller
Description de Bluetooth Robot Car Controller
Tilt your smartphone to control your own Robot. Here is a simple project to control your Robot/Robo Car using Bluetooth Module HC-05 & 89c2051 Microcontroller with your Android Smartphone device. In this project the accelerometer of your android Smartphone is used to detect the tilt movement angle of Smartphone, just tilt your mobile Forward, Backward, Left and Right to control the direction of Robot.
You can download Circuit & HEX File here http://www.hobbyprojects.com/bluetooth-device-control/
App Instructions:
1. First make sure your HC-05 Bluetooth Module is paired with your mobile. The default password for pairing is "1234" or "0000". Check the manual of Bluetooth module.
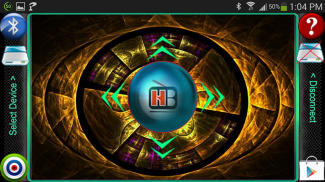
2. Click on "SELECT DEVICE" icon to select paired Bluetooth module.
3. When you tilt mobile "FORWARD" it sends the data "A" to Bluetooth Module connected with the circuit. When Microcontroller detects "A" the Robot / Robot Car moves FORWARD.
4. When you tilt mobile "BACKWARD" it sends the data "B" to Bluetooth Module connected with the circuit. When Microcontroller detects "B" the Robot / Robot Car moves REVERSE.
5. When you tilt mobile "LEFT" it sends the data "C" to Bluetooth Module connected with the circuit. When Microcontroller detects "C" the Robot / Robot Car turns LEFT.
6. When you tilt mobile "RIGHT" it sends the data "D" to Bluetooth Module connected with the circuit. When Microcontroller detects "D" the Robot / Robot Car turns RIGHT.
7. When the mobile phone is not tilted in any direction (screen upward position), it sends the data "E" to Bluetooth Module connected with the circuit. When Microcontroller detects "E" the Robot / Robot Car gets STOPPED. You can also stop the robot by pressing STOP button which is in the center of remote.
Inclinez votre smartphone pour contrôler votre propre robot. Voici un projet simple à contrôler votre robot / Robo voiture via Bluetooth Module HC-05 & 89C2051 microcontrôleur avec votre appareil Android Smartphone. Dans ce projet, l'accéléromètre de votre smartphone Android est utilisé pour détecter l'angle de mouvement d'inclinaison de Smartphone, juste incliner votre téléphone portable avant, arrière, gauche et droite pour contrôler la direction du robot.
Vous pouvez télécharger Circuit & HEX Fichier ici http://www.hobbyprojects.com/bluetooth-device-control/
App Instructions:
1. Tout d'abord assurez-vous que votre HC-05 Module Bluetooth est jumelé avec votre téléphone portable. Le mot de passe par défaut pour le jumelage est "1234" ou "0000". Consultez le manuel du module Bluetooth.
2. Cliquez sur l'icône "DEVICE SELECT" pour sélectionner jumelé module Bluetooth.
3. Lorsque vous inclinez mobiles "avant", il envoie les données "A" au module Bluetooth connecté avec le circuit. Lorsque microcontrôleur détecte "A" le Robot / voiture robot avance.
4. Lorsque vous inclinez mobiles "arrière" il envoie les données "B" au module Bluetooth connecté avec le circuit. Lorsque microcontrôleur détecte "B" le Robot / voiture robot se déplace inverse.
5. Lorsque vous inclinez "GAUCHE" mobile, il envoie les données "C" pour le module Bluetooth connectés avec le circuit. Lorsque microcontrôleur détecte "C" le Robot / Robot voiture tourne à gauche.
6. Lorsque vous inclinez mobiles "DROITE", il envoie les données "D" au module Bluetooth connecté avec le circuit. Lorsque microcontrôleur détecte "D" le Robot / voiture robot tourne à droite.
7. Lorsque le téléphone mobile est pas incliné dans toutes les directions (position vers le haut de l'écran), il envoie les données "E" au module Bluetooth connectés avec le circuit. Lorsque microcontrôleur détecte "E" le Robot / Robot voiture est ARRETE. Vous pouvez également arrêter le robot en appuyant sur le bouton d'arrêt qui se trouve dans le centre de la télécommande.
Bluetooth Robot Car Controller - Version 1.0
(07-12-2018)Bluetooth Robot Car Controller - Information APK
Version APK: 1.0Package: appinventor.ai_hobbyprojects_com.BluetoothRoboControllerAncienne Version de Bluetooth Robot Car Controller














Applications de même catégorie


Vous pourriez également aimer...







